社畜博士のロボット工作室
管理人が製作したロボット作品、電子工作作品を紹介しています
2023年ロボトレース競技用ロボット
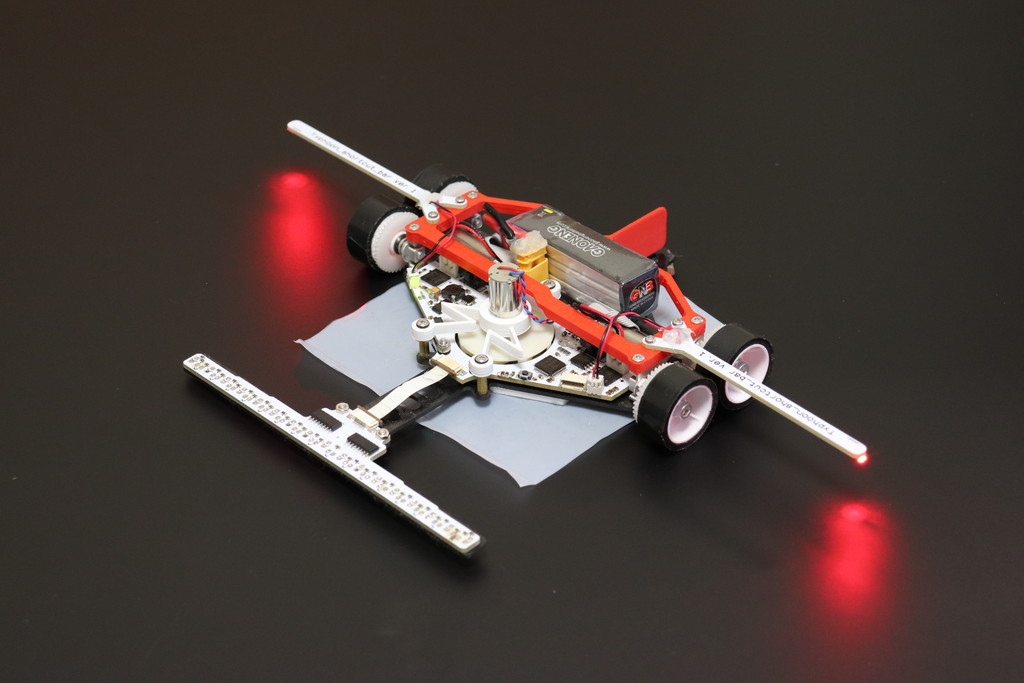
| 名前 | Aegis 2024 (2023年 ロボトレース優勝機) |
| マイコン | RX66T with e2 studio (RAM 64KB, ROM 512KB, ex-flash 8MB) |
| モータ | Maxon DCX10L x2 |
| エンコーダ | Maxon ENX EASY 1024ppr x2 |
| ジャイロ | STMicro LSM6DSR |
| モータドライバ | Toshiba TB67H420FTG |
| バッテリー | LiHv 3S 300mAh (80C/160C) |
| 吸引モータ | DRW002 |
| ラインセンサバー | 自作。 汎用フォトトランジスタ SCM-014TB x16 赤外線LED OSI3120641E x17 |
| 重量 | 130g |
| 名前の由来 | 漫画「そらのおとしもの(水無月すう作)」にでてくるヒロインの武装の名前 |
●概要
・ロボトレースにおいてアウトインアウト走法を実現した(世界初?)
・吸引機構を搭載し、●●(ピー)gの吸引を実現した
●動画
NVSのライブ配信↓
反省会動画↓
爆速走行の様子↓
2020年度全日本マイクロマウスオンライン ロボトレース競技の課題を走行させてみた↓
●SNSなどの評判
Xでの評判↓
Abema で紹介された記事はこちら(動画は公開終了)↓
速すぎて見えない!驚異的な速さでコースを外れることなく走りきるロボットに会場がどよめき「えげつない速さ」 | 話題 | ABEMA TIMES | アベマタイムズ
●特徴
① アウトインアウト走法搭載の全面ショートカット走行(詳細は後述)
昨年度に引き続き、全面ショートカット走行を実装した。結果は見ての通り、ほぼ理想的なショートカット走行ができるようになったが、まだ安定しない。
② 吸引機構(詳細は後述)
レギュレーション解禁に伴い、原理開発から実施した。開発に半年かかった(笑)
③ RX66Tマイコン
昨年度に引き続き採用した。理由は「昨年度のプログラムを使いまわすため」。吸引機構開発のためマイコンを変えている余裕はなかった。160MHzのCPUにものを言わせているが、RAMが64kBしかないためカツカツ。
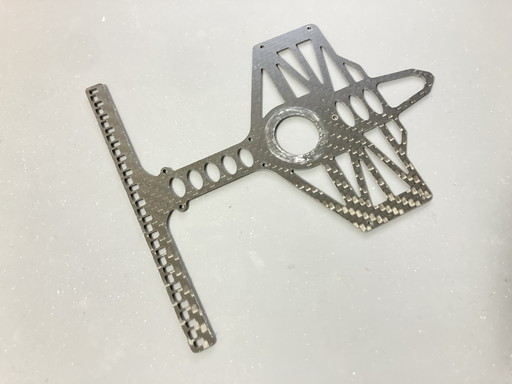
④ カーボン一体型シャーシ
昨年度に引き続きカーボン一体シャーシ構造を採用。吸引機構のせいで爆速化したロボトレーサーが暴走して壁に激突してもラインセンサは無傷で済むようになった。
⑤ Maxon DCX10L (エンコーダ付き)
世間ではDCX12L以上の大型モータが流行し主流になりつつあるが、私は制御パラメータを作りこめなかったためDCX10Lで出ることにした。ただし、「3V版」であるため、3Sで使っても結構なオーバードライブ率になる。想定T-N特性を見るとDCX12L4.5V版4Sに対してトルクが半分。なので全面ショートカットと組み合わせると勝負にならないほどではないと判断した。さらにいうと、DCX12L機も開発したが10L機と同じスピードしか出せず、モータ重い分カーブで不利になっていたため、今年のAegisには10L出場が最適解であった(同じスピードしか出なかったのは間違いなく設計が悪かったせい)。
⑥ 超高出力モータドライバ TB67H420FTG
DCX12Lに流れる電流にも堪えるよう、新しいバカデカモータドライバーを採用した。いつも通り安心の東芝製。ピーク9Aに堪える上に電流リミット機能付きはマジ優秀。なお本番はDCX10Lを使ったので意味はなかった模様。
⑦ ジャイロセンサー
昨年度に引き続きLSM6DSRを4000dpsレンジで使っている。吸引開発のせいで、ここを変えている余裕はなかった。温度特性が優れていることが有能。
⑧ シリアルフラッシュメモリ
いつも通り。今回は大会後にログデータを速攻で吸いだして何人かに見せた。リアルタイム制御データを可能な限り全部保存している。今回はPythonアプリで見せたが、去年まで普通にエクセルで解析していたのでエクセルで十分。
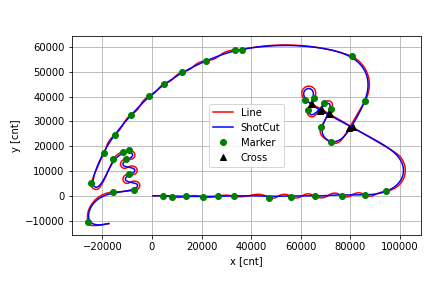
● 全面ショートカット走行
昨年度と同様に、記録したコースのXY座標データを1周目で保存し、最適経路を導出して、2走目以降は自己位置推定をもとに仮想ライントレースする走法。今年はついに、アウトインアウト走法にて走行できるようになった。移動平均での平滑化ではない、正真正銘のマジモンの”最適”経路である。単純な経路のみの議論であれば、曲率が最も小さくなるアウトインアウトはたぶん最速解なので、Aegisと勝負したいとなると
① 同じアウトインアウトでよりショートカット率の高いハイリスク経路を取る
② マシンスペックで圧倒的に上回る
③ 速度と経路の同時最適化を解いてさらに速い経路を計画する
をいずれかをやる必要がある。①をやるにはオドメトリ精度が足らず、③は相当に無理なので、やるなら②。現状2~3名が実現できている。パワーでゴリ押せ!
今回の全面ショートカット走行にて、おそらくここ数年のロボトレースにおける理想解(主催者視点)を叩き出した。言い換えると、ショートカット走行の経路計画レベルを、上げてはいけないところまで上げてしまった(笑)
アウトインアウトの計算には多量の反復計算を要するためものすごく時間がかかる。バカ正直に実装すると競技時間中に間に合わないか、そもそもRAMが足りないのどちらかになる。Aegisの場合は、計算時間もRAMもどちらも足りなかった。だがどうやってそれを実現したのか...秘密♡
なお、このサイズのロボットでマイコン内で完結している前例は確認できなかった。たぶん世界初。ふつうはPCにて汎用計算ライブラリを使ってやるものなようで、マイコンでこんなもん計算する需要は無い。
ちなみに、ラジコンカーやロボットカーのレースではアウトインアウト走法はスタンダードらしく、走法自体は既存だしオリジナリティはない。チャレンジすることは正直おすすめせず、全面ショートカット走行が安定しているおひとりをのぞいて中身を教えていない。この課題はあくまで「全面ショートカット走行が安定してできる上でさらに上を目指すならどうするか?」という課題なので、まず仮想経路追従を実装して、移動平均経路で走れるようになってからでいい。移動平均経路だけで8割くらいの性能が出るから。昨年度のAegisも移動平均経路だから。
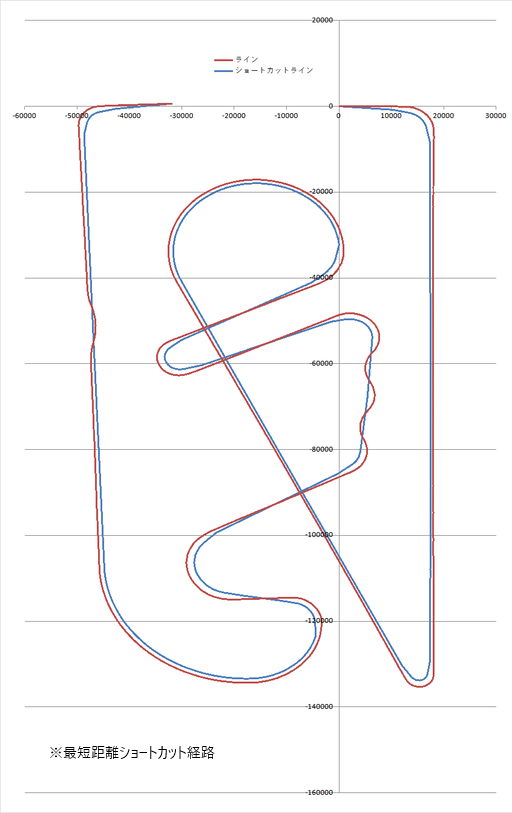
その他、地区大会においてはアウトインアウトではなく、最短距離経路で走っていた。全日本のエントリーでも「最短距離で走る」と言っていたが、大会2週間前になって技術的に何とかなりそうなレベルまできて、1週間前の最終調整で「これはイケる!」となり大会に至る。ちなみに最短距離求めるほうが楽。
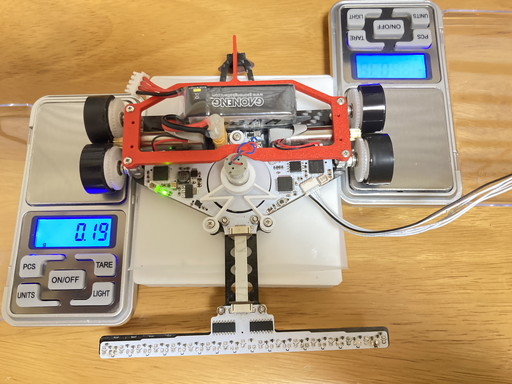
● 吸引機構
原理開発から始めて半年かかった上に、デバッグのためにほとんどの地区大会に参加する羽目になった。北は新潟から南は九州まで。体重は重くなるのに財布は軽くなる軽くなる。地区大会をデバッグに使うなと言われそうだが、段差がほぼない広い板コースなんて自分じゃ用意できなかった。
いくらかの人には見せているが、吸引で恐ろしい力を出している。数字は特定人にしか言っていなかったのだがどうも巷に出回っており、口が軽い人がいるようだ。誰かな~。
さて、開発にて何があったかというと、吸引解禁が宣言されたときに「爆裂に吸いまくるトレーサーに駆逐される」と危惧し、BLDCファンによる吸引を検討した。しかし3カ月たっても一向に形にならず断念し、ブラシモータによる吸引を余儀なくされた。でブラシモータになってからも、吸うのだが全くグリップしない、という現象に悩まされた。そのため、吸引荷重計測装置を開発し、実際にタイヤにかかる負荷荷重を計測するようにしたところ、案の定荷重がかかっていなかったり、変なかかり方していることが判明。いろいろ修正するとなんと、最終的に●●(ピー)gも吸引できるようになり、多分RT界隈で最も吸引荷重がかかっているトレーサーになった。ちなみにそんだけ吸ってもまだタイヤが滑るので根本的な箇所がダメな模様。設計ノウハウは長くなるので省略するが知りたい人は地区大会にて私に聞くか某最強学生団体にノウハウを授けたのでそちらへ。来年はバカデカ吸引力トレーサーでさらにパワーでゴリ押せ!
この吸引機構、原理構築するのに死ぬほど苦労したものの、結果的にクラシックでめっちゃつよい人と同じ設計理論になったと思われる。その証拠に、ドデカモータに薄型ファン1個と分厚い2次スカートなど、随所の構造がそっくり。
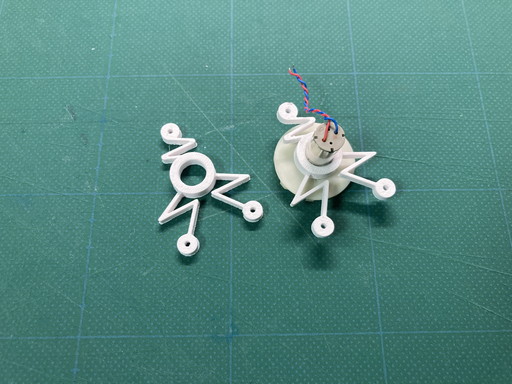
唯一のオリジナリティは、吸引モータをふにゃふにゃのフレキシブルマウントで固定したところ。最初は剛なマウントを採用していたが、ファンモータの振動で随所のねじが一瞬でゆるんだり、ジャイロに意味不明なノイズがのったりした。「やべぇ、俺の吸引ファン、偏心しすぎ」。その後、対策としてノリで作った稲妻形状のばね支持構造が一発で所望特性となってしまい大笑い。SA☆SU☆GA俺!ジャイロセンサーへのノイズはだいぶ低減し、ねじもゆるまなくなった。ほかにもファンとシャーシ面のクリアランスを受動的に調整する効果もあるらしく、ファン回転初めにチリチリといった異音がするのが、高速回転に移行すると途端に消える。なんとこのマウンター、左右だけじゃなく上下にも動くぞ。
さらに言うと、デザインにこだわったせいで基板に大穴が開く結果となった。ダクト構造だったり基板を上にマウントする構造であれば一瞬で作れたものを(笑)。中央の大穴を避けて基板の配線引きまわすの大変なんだから。いや、どうしても見た目低重心(なお実際は)にしたかったのよ。
吸引ファンはノリとセンスで作ったのでどうとも言えない。直径も羽の数も厚みもノリとセンス。みんなもノリとセンスで作れ。詳細な寸法は秘密。なにせノリとセンスなので。その他スペックは...みんな全日本会場で写真取ってるでしょ?
●田代賞について
いわゆるMVP賞。まさかもらえるとは思っていなかった。というより存在を忘れていた。ここ数年ロボトレースに全リソースを投入し開発を推し進めていたにもかかわらず、あと一歩のところでダメだったことがたくさんあったたため、苦労が報われてとてもうれしかった。
●マップ
こんな感じ。スタートとゴールが不一致すぎる。Aegisの恥部ですよ恥部。よくこれでショートカット走行できたなと感心してる。
●2024年にやりたいこと
① 名実ともに最速を目指す
ロボトレースには天上界にて神々の遊びをしている人たちがおり、そこでは、今年のAegisよりも明らかに速い機体がいる。そう、「優勝」はしたが「世界最速」ではないのである。つまり、そういうことである。
とりあえずシーズンを共にしたDCX12LのAPOLLON君を使いこなすところから始める。元ネタは...わかるな?
② 真なるアウトインアウト経路
計算量の都合で妥協した分を力技で解きたい。そして、真なるアウトインアウト経路で走りたい。それにより破壊されるロボトレース界...大丈夫!パワーでゴリ押せ!
③ ノウハウの有料記事化
Xにてつぶやいた話。賞金設定のあるマイクロマウスにおいて誰もかれもタダで情報出せはさすがに無理があるので、優良な情報にインセンティブがつく文化を作りたい。そして今よりも情報をしゃべりやすい文化にしたい(訳:もう吸引機構のような、周りに実践者はいるのに結局ゼロベース開発になるような目に会いたくない)
④ 転生したらトレーニングトレーサーだった件
トレーニングトレーサーを使って全面ショートカット走行の教材を作りたい。まぁたった4個のセンサと16kBしかないRAMで全面ショートカットができるのかということがある。あとトレーニングトレーサーってオドメトリできんの?田代賞の研究奨励金の使い道。
2024.03.某日 ... DE☆KI☆TA
●ギャラリー



     |