社畜博士のロボット工作室
管理人が製作したロボット作品、電子工作作品を紹介しています
2024年ロボトレース競技用ロボット
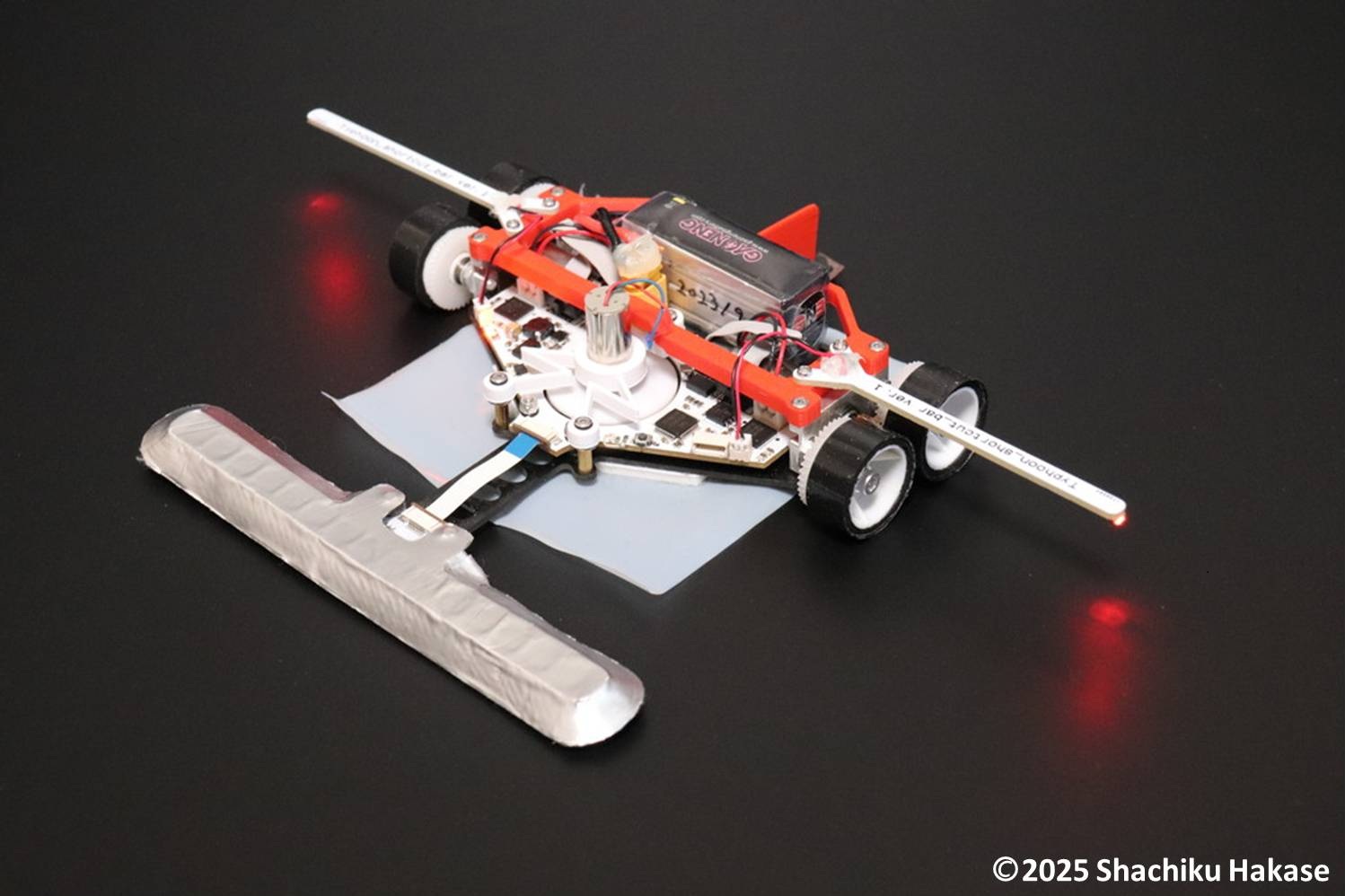
| 名前 | APOLLON (2024年 ロボトレース優勝機) |
| マイコン | RX66T with e2 studio (RAM 64KB, ROM 512KB, ex-flash 8MB) |
| モータ | Maxon DCX12L 3V x2 |
| エンコーダ | Maxon ENX EASY 1024ppr x2 |
| ジャイロ | STMicro LSM6DSR |
| モータドライバ | Toshiba TB67H420FTG |
| バッテリー | LiPo 4S 300mAh (80C/160C) |
| 吸引モータ | DRW002 |
| ラインセンサバー | 自作。 汎用フォトトランジスタ SCM-014TB x16 赤外線LED OSI3120641E x17 |
| 重量 | 140g |
| 名前の由来 | 漫画「そらのおとしもの(水無月すう作)」にでてくるヒロインの武装の名前 |
●概要
・ロボトレースにおいてアウトインアウト走法を安定的に実現した
(世界初技術)
・DCX12Lを搭載し、アホみたいなスピードで走れるようにした
●動画
NVSのライブ配信↓
反省会動画↓
TBD
●特徴
① アウトインアウト走法搭載の全面ショートカット走行(詳細は後述)
昨年度に引き続き、アウトインアウト走法による全面ショートカット走行を実装した。今年は経路計画計算をより高速化することで、現実的な時間内でも必要程度に大胆さのある経路計画ができるようになった。
② 吸引機構(詳細は後述)
昨年度に引き続き実装。バッテリー4S化に伴い吸引モータにバッテリー電圧を直接印加できなくなったため、昨年度は封印していた専用降圧DC-DC回路を使うことになった。
③ RX66Tマイコン
昨年度に引き続き採用した。理由は「昨年度のプログラムを使いまわすため」。お蔵入りとなった別のトレーサーの開発のために時間を割いており、こちらは変更しないことにした。
④ カーボン一体型シャーシ
いつも通り。吸引機構のせいで爆速化したロボトレーサーが暴走して壁に激突してもラインセンサは無傷で済んでいる。しかし、DCX12Lのパワーに耐えられず、1回だけシャーシが折れたことがある。厚み1.5mmだからこそできる一体品である。
⑤ Maxon DCX12L (エンコーダ付き)
昨年度流行ったDCX12Lをようやく使いこなした。私の場合、選択した定格は「3V版」であるため、4Sで使うとお察しなオーバードライブ率になる。試合中にモータが焼き切れるほどにヤバイが、想定T-N特性を見るとすさまじい性能となる。こういうのを悪魔の選択という。
⑥ 超高出力モータドライバ TB67H420FTG
昨年度採用したドライバーをそのまま。というより、基板自体は昨年度と全く同じ。もっと言うと、この機体のための基板なので昨年のほうが異常なのです。よくあのオーバードライブ率の駆動に耐えきったと感動している。
⑦ ジャイロセンサー
昨年度に引き続きLSM6DSRを4000dpsレンジで使っている。まさか大会当日に貼り換えてもらうことになるとは。
⑧ シリアルフラッシュメモリ
いつも通り。今回も大会後にログデータをすぐに吸いだした。走行10分後にはログがみれる状態。「もうログみれるんすか?」って驚かれた。ログになんかありえねぇ速度が記録されているのだが、きっと夢です。見なかったことにしましょう。
● ショートカット走行
いつも通り、記録したコースのXY座標データを1周目で保存し、最適経路を導出して、2走目以降は自己位置推定をもとに仮想ライントレースする走法。数年前まではショートカット走行なんて夢の技術であったはずなのに、私含め何名かで安定的に実現してしまったせいで何のありがたみもなくなってしまった(笑)。もうショートカット走行がうまくいくかハラハラしているのはウチだけかもしれない(泣)。おっかしいな、ショートカット走行って安定するものじゃないはずなのに。
経路計画にはOut-In-Out走法が採用されており、コース全域で曲率が小さくなる方向に最適化計算がされる。はずなのだが、どうもタコツボ他で曲率が大きくなっており、最適化計算理論がどこか間違っている可能性が浮上している。一応走れるので見なかったことにしているが、見直しには時間がかかりそうである。なお、計算式を改善して、去年より高速で計算できるようにした。いつも通り、APOLLONへの対策方法なのだが、
① ライントレースにて、超パワーマシンでゴリ押す
② ウチよりもちょっといいマシンで同じショートカット走行をする
③ 速度と経路の同時最適化を解いてさらに速い経路を計画する
である。もっとも現実的な①にてバスティング射程圏内なので、来年には撃ち落されるされるでしょう。ショートカットマシンはマシンスペックが1~2世代前になるのが宿命というのがここ数年でわかった。なのでゴリ押しが効く。いいかい、ショートカット走行なんて博打しないで、素直にパワーでゴリ押すんだぞ?力こそパワー!
● あまりにもオーバードライブされてしまったDCX12L
3V定格のモータを、15V以上かけて使っている異常。狂気。なんでこんな狂気の沙汰をしているのか自分でも分からない。かろうじて覚えているのは、カタログ見てたら「定格3V使っちゃいなよ、めっちゃオーバードライブできるよ?」ってささやきが聞こえたことである。その狂気の沙汰にはさすがのマクソンモータも悲鳴を上げて、競技中に故障してしまった。1シーズン使えればいいかと思っていたが、5倍のオーバードライブには1シーズンすら耐えられなかった。こんな使い方しているのをマクソン社に見られようものなら激怒されてしまう。全世界生中継のもとで故障したマクソンモータがかわいそうすぎる。不幸中の幸いだったのは、MAX走行の4走目までは耐えきったことである。ある意味究極のタイミングでの故障だった。
さすがに狂気の沙汰が過ぎるので、来年は某学生団体をぱくってグラファイトブラシモータにして、軽吸引にしてゆっくり走行することで、長寿命で末永く楽しめるトレーサーを作ると思う。旋回速度さえ落とせば車重なんて関係ないじゃないですか。
※ なお、昨年度から使っているモーターは1シーズンカウントなのか疑問はつきない
● IMUについて
私の大会前日の様子を見ていた人ならお分かりかと思うが、パラメータを上げようと調整していたところ暴走衝突し、IMUが不調に陥った。ごくわずかにオフセットや校正係数が変わるほか、時変的な誤差が発生してしまい、方位角が正確に計測できなくなる。これの解決策は、現状IMUの交換のみである。
でも交換するIMUを、交換の道具ももってきていない。詰んだ。...のだったのだが、マイクロマウスにて知り合った方々が声かけをし、そこで集まった同じくマイクロマウスで知り合った方たちが手を貸してくれて、交換先のIMUと交換する道具や環境を用意してくれた。そのうえヒートガンによるIMU交換のプロが登場し、なんと完璧な性能で貼り換えてくれた。結果、APOLLONは競技にて正常に走行することができた。この場を借りて改めて感謝を申し上げます。本当にありがとうございました。
で、たぶんマウサーとしてはそんな背景事情より気になっているであろうIMUに存在する非線形時変不調についてなのだが、現状分かっていることは
① どこかに衝突すると発生することがある
② 発生すると、校正係数が微妙に変わる
③ 致命的な不調として、タイミングランダムで微妙にジャイロの値が異なることがある。結果、オドメトリが微妙に狂う(図はそのうち)
④
ロボトレースのように、閉曲線にて、プログラム次第で何周もできる場合において、その複数周回のマップを取得すると、明らかにモードの異なるマップがとれる
④ 自然に直った経験はない
である。そのため、発生していることを調べることはできるのだが、一切補正は効かないので交換するしかない。原理も全く分かっていない。
一方、正常なIMUのジャイロにて、オフセットを取り除いてから複数周回のマップをとるとコースの向きが等角度でずれていくようになる(これも図はそのうち追記)。特性が時間で均一なので、角度のずれ方が毎周回同じなのである。これが毎周回のうちランダムで変わるのがおかしな異常なIMUである。あとは、校正係数を求めて補正してあげると向きがぴったり一致するようになる。正常なマップを見ると(そのうち図は載せるので)、異常なIMUがいかに異常かを痛感させられる。
これは、ロボトレースのように閉曲線コースだからできるデバッグ方法なので、迷路のマイクロマウスではどのように応用するか悩ましい。細長いサーキットコースを5周くらい等速で走らせれば分かるか...?たぶんマウスの方でも同じことになっていると思われるので、壁にぶつかったらバシバシIMUを交換しましょう。
※ 図はそのうち載せます。気長に待ちましょう
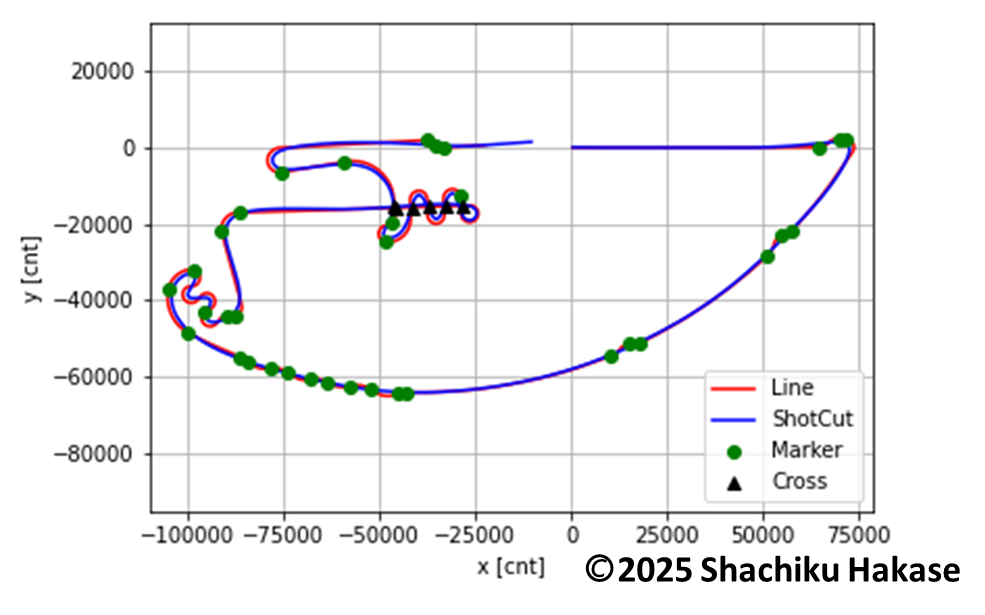
●マップ
こんな感じ。マウサーの人は会場にてもう見ているであろうから新鮮味はないと思う。広すぎてどこショートカットしてるのか分からない。走行動画を見よ!
●2025年にやりたいこと
① 安定した特性のトレーサー
競技中にブラシが焼き切れるような無茶なトレーサーだったり、暴走一発で試合終了となるようなことはない、安定的で堅牢なトレーサーを作る。彼方より黒鉛がどうとか聞こえる。
② 普及版ショートカット走行技術の開発
今年度、何人かの相談にのっていて分かったのだが、ショートカット走行は、開発に必要な知識が高度すぎるという問題があった。そうするとあまりの難しさにハートブレイクされてしまい、教えないほうが良いレベルであった。
すなわち、私が今年開発したトレーニングトレーサー用のショートカットプログラムは、公開したところで一部の理解できる人(というか、もはや既にショートカットがある程度できている人)だけが使えるモノと化し、教材として全く機能しないことが分かった。開発大失敗である。
こうなる原因は、私の使っているショートカットアルゴリズムの方法論を理解するには人によってはあまりにも勉強に時間がかかり、また実装も手間がかかることだと考えている。もっと単純に、簡単に、直感的に使える方法論が必要である。
なので、私が使っているショートカットアルゴリズムをフルスペック版としたときに、スペックを落としてでも超絶簡単な方法論で動くミドルスペック版ショートカットを開発したい。高校生3年生が見て「うん、そうなるよね」と言えるものがよい。そんなことできるのかって?わ・か・ら・ん(笑)
●ギャラリー
準備中なり
     |