社畜博士のロボット工作室
管理人が製作したロボット作品、電子工作作品を紹介しています
ロボトレース競技用ロボット
(↑画像クリックで専用ページにとびます)
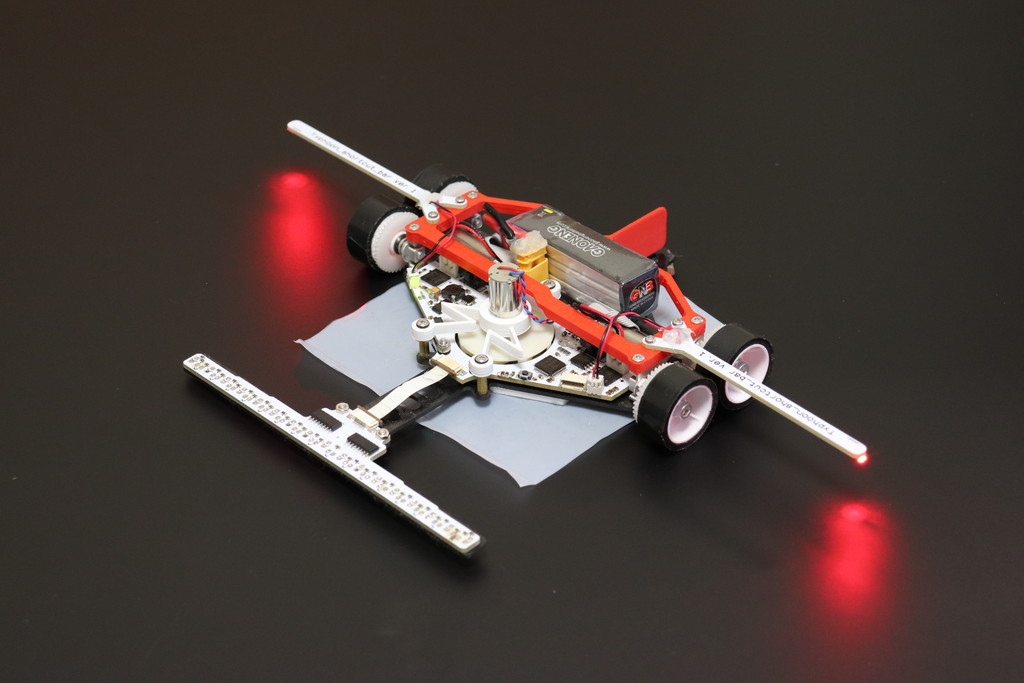
| 名前 | APOLLON (2024年 ロボトレース優勝機) |
| マイコン | RX66T with e2 studio (RAM 64KB, ROM 512KB, ex-flash 8MB) |
| モータ | Maxon DCX12L 3V x2 |
| エンコーダ | Maxon ENX EASY 1024ppr x2 |
| ジャイロ | STMicro LSM6DSR |
| モータドライバ | Toshiba TB67H420FTG |
| バッテリー | LiPo 4S 300mAh (80C/160C) |
| 吸引モータ | DRW002 |
| ラインセンサバー | 自作。 汎用フォトトランジスタ SCM-014TB x16 赤外線LED OSI3120641E x17 |
| 重量 | 140g |
(↑画像クリックで専用ページにとびます)
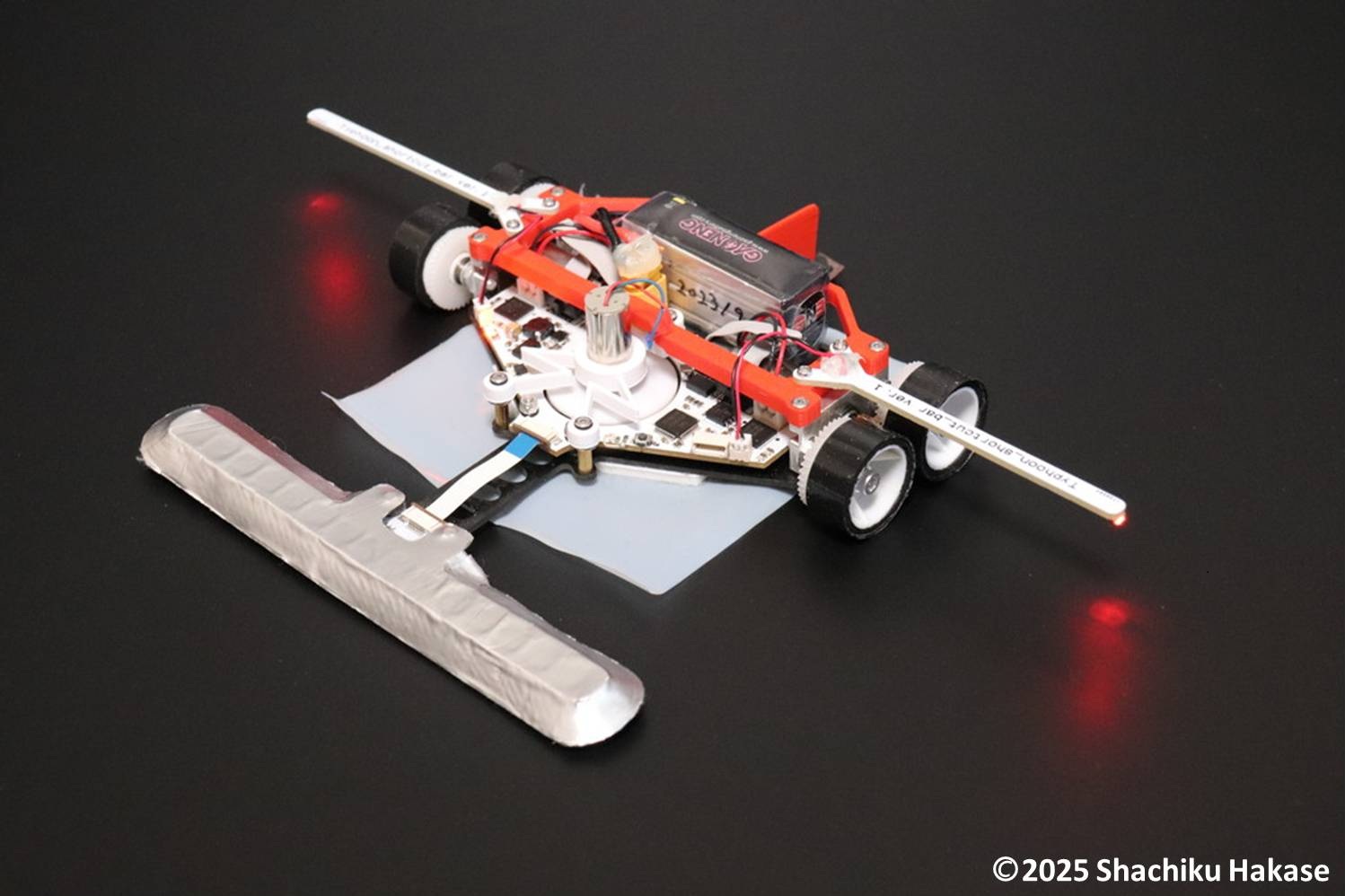
| 名前 | Aegis 2024 (2023年 ロボトレース優勝機) |
| マイコン | RX66T with e2 studio (RAM 64KB, ROM 512KB, ex-flash 8MB) |
| モータ | Maxon DCX10L x2 |
| エンコーダ | Maxon ENX EASY 1024ppr x2 |
| ジャイロ | STMicro LSM6DSR |
| モータドライバ | Toshiba TB67H420FTG |
| バッテリー | LiHv 3S 300mAh (80C/160C) |
| 吸引モータ | DRW002 |
| ラインセンサバー | 自作。 汎用フォトトランジスタ SCM-014TB x16 赤外線LED OSI3120641E x17 |
| 重量 | 130g |
(↑画像クリックで専用ページにとびます)
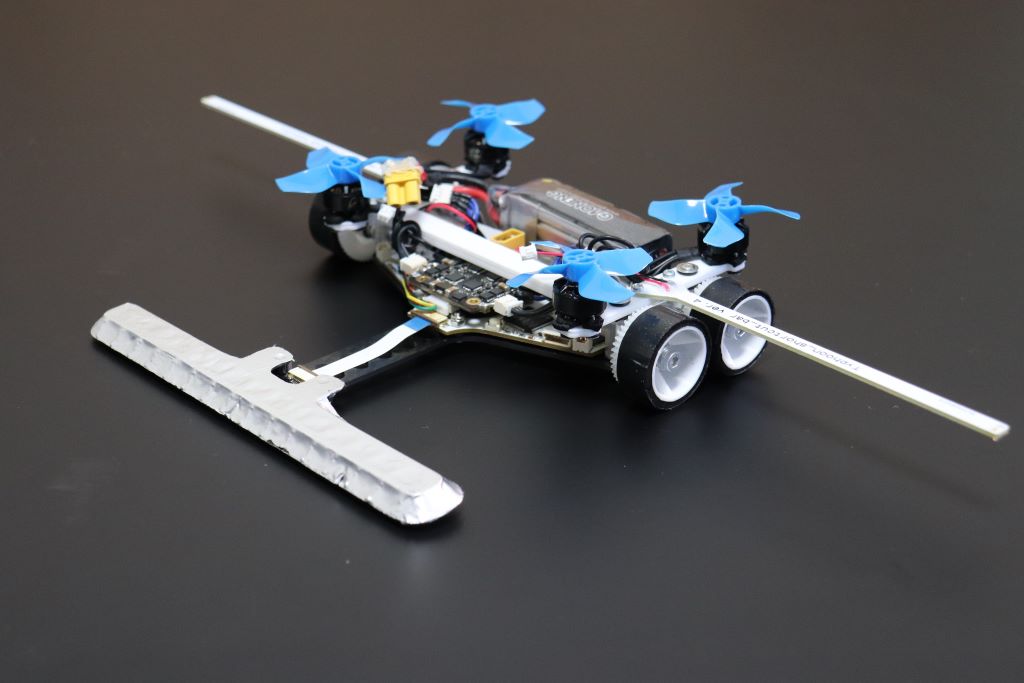
| 名前 | Aegis 2023 (2022年 RT出場機) |
| マイコン | RX66T with e2studio |
| モータ | Maxon DCX10L x2 |
| エンコーダ | Maxon ENX EASY 1024pls x2 |
| IMU | LSM6DSR (昔は3軸ジャイロのL3GD20H) |
| バッテリー | GAONENG 3S 300mAh (80C/160C) |
| ファンユニット | 1103 ブラシレスDCモータ with BETAFPV ドライバ |
| ラインセンサバー | 自作。以下の組み合わせで制作した 汎用フォトトランジスタ SCM-014TB x16 IR-LED OSI3120641E x17 |
| 重量 | 130g |

(↑画像クリックで専用ページにとびます)
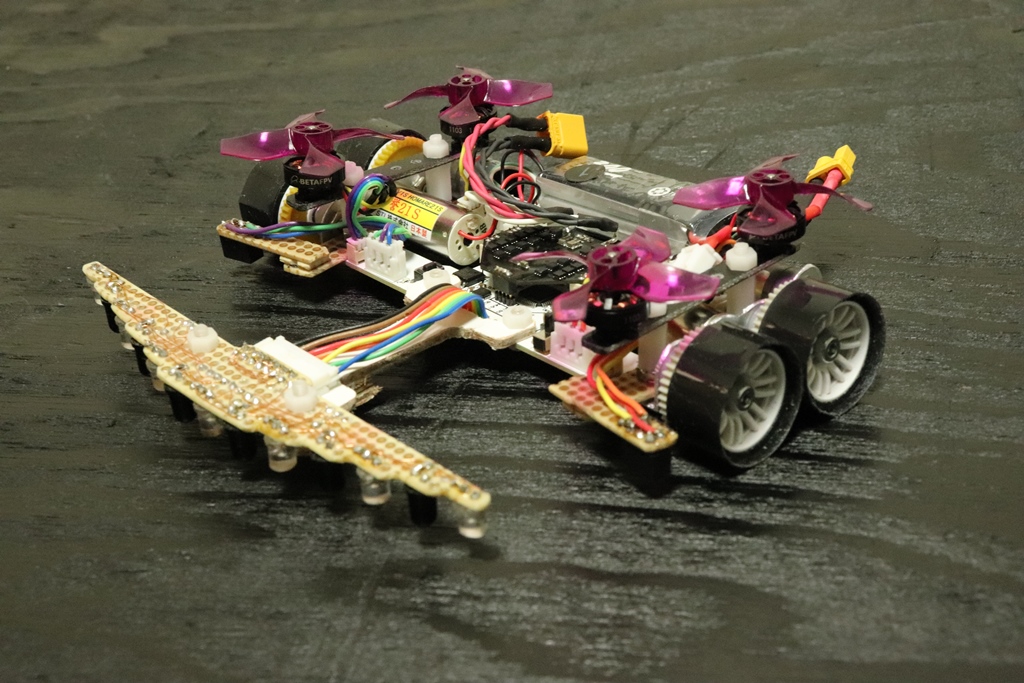
| 名前 | Aegis 2021 (2021年 RT出場機) |
| マイコン | STM32F103 C8T6 with Arduino IDE |
| モータ | Maxon DCX10L x2 |
| エンコーダ | COPAL RE12D 100pls x2 |
| IMU | MPU9250 |
| バッテリー | BETA FPV 3S 300mAh (45C/75C) |
| ファンユニット | 1103 ブラシレスDCモータ with BETAFPV ドライバ |
| ラインセンサバー | 自作。以下の組み合わせで制作した 汎用フォトトランジスタ SCM-014TB x16 (1kΩ) IR-LED OSI3120641E x17 (330Ω) |
| 重量 | 160g |

(↑画像クリックで専用ページにとびます)
| 名前 | Aegis 2020 (2020年 RT出場機) |
| マイコン | STM32F103 C8T6 with Arduino IDE |
| モータ | Maxon DCX10L x2 |
| エンコーダ | COPAL RE12D 100pls x2 |
| IMU | ICM42605 |
| バッテリー | BETA FPV 3S 300mAh (45C/75C) |
| ファンユニット | 1103 ブラシレスDCモータ with BETAFPV ドライバ |
| ラインセンサバー | 自作 汎用フォトトランジスタ SCM-014TB x16 (1kΩ) IR-LED OSI3120641E x17 (330Ω) |
| 重量 | 150g |
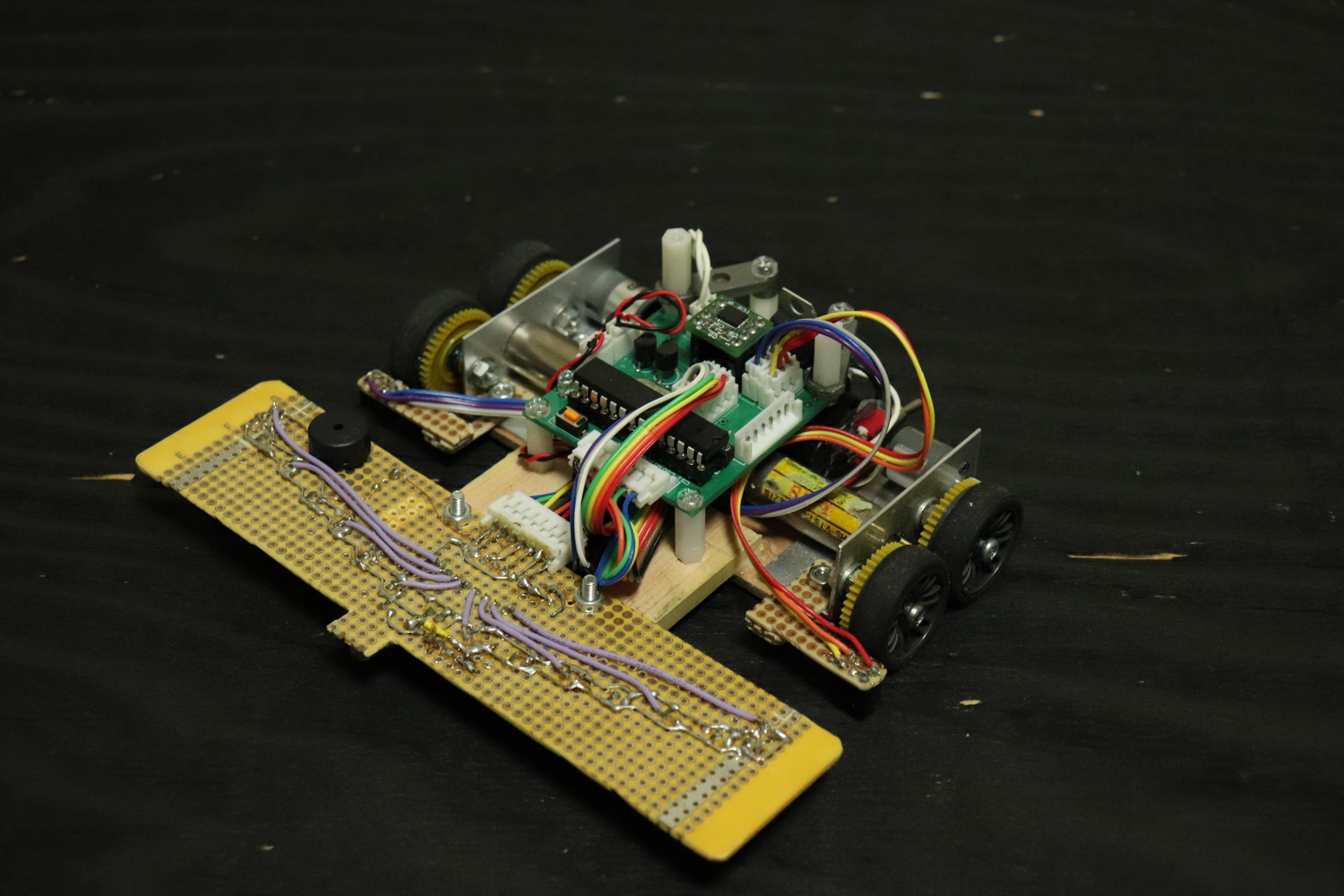
| 名前 | 乱気流1.9 (2019年 RT出場機) |
| マイコン | STM32F103 C8T6 with Arduino IDE |
| モータ | STL Japan 誉21S x2 |
| エンコーダ | COPAL RE12D 100pls |
| IMU | MPU9250 |
| バッテリー | TBS LiHV 2S 300mAh (80C/160C) |
| ファンユニット | 1103 ブラシレスDCモータ with BETAFPV ドライバ |
| ラインセンサバー | 自作。汎用フォトトランジスタ x6 + IR-LED x7 |
| 重量 | 161g |
・特徴
① ダウンフォースファンユニットの搭載
1103サイズのブラシレスDCモータと、BETAFPV用の2Sブラシレスドライバを搭載した。最大120gの押し付け力を発揮できる。技術開発し、使いこなすまでに半年かかった。すごくうるさい。
② 高出力バッテリー
300mAh 定格80C(24A)のバッテリーを搭載した。ファンユニットで10A以上の大電流を消費するため、それに耐えられる大出力バッテリーが必要であった。このバッテリーはサイズ、性能、価格すべてで優秀である。
③ シリコンシートタイヤ
自作のシリコンシートタイヤを搭載した。グリップ力が半端ではなく、ファンユニットと組み合わせると2m/sでR10ターンを回ってもびくともしない。もはやギャグ。材料は、扉の隙間を埋めるEVAスポンジ(2mm厚)に、マイコンカーラリー用シリコンシートである。
・2019年度の成果
①加減速走行ルーチンの完成
加減速走行を自力で完成させた。方法は別ページにて掲載予定である。
概要は簡単で、1周目の角速度情報をもとに速度計画を立てて2周目でプレイバックしているだけ。
※加減速走行とは
直線では速く、カーブでは遅く走ることで、全体のタイムを向上させる走行のこと
②BLDCによるダウンフォースファンユニット
これは来年やる予定だったが、2018年度の状況をみて急遽前倒しした。まさか半年もかかるとは思っていなかった。全国大会時点では、安定してファンユニットを運用できるところまで到達できた。
| 名前 | フジトレーサー2号 (2018年 RT出場機) |
| マイコン | ATMEGA 328P (Arduino UNO bootloader書込済) |
| モータ | STL Japan 誉21S x2 |
| エンコーダ | COPAL RE12D 200pls |
| ラインセンサ | フォトトランジスタ- x6 + マーカーセンサ2 |
| ジャイロセンサ | ISZ-650 |
| 加速性能 | 不明 |
・特徴
2018年のマイクロマウスに出場させた。プログラムの開発コストをそぎ落とすため、Arduino
UNOをマイコンとして選定した。そのため、8bitマイコン一つに、モータ制御、センサ処理にオドメトリと、ロボトレースに必要な機能のすべてを処理をすることになってしまった。しかし効果はてきめんで、豊富なライブラリやArduinoの素直な挙動もあり、たった数か月で、走るために必要なプログラムがすべて記述できた。結果として、2018年度初出場にもかかわらず、ロボトレース競技で完走することができた。
     |